Multi-Terrain Mastery: LEAP-One Rover Aces Mobility Tests for ERC 2026 and ICARM Publication

Schmalkalden, Germany — The Rover Department at HSM Aries.space recently conducted a comprehensive field testing session to evaluate our LEAP-One mobility platform. This rigorous test served a critical dual purpose: validating our chassis for the upcoming European Rover Challenge (ERC) 2026, and capturing empirical mobility data for our upcoming peer-reviewed publication. The data gathered during […]
Subsurface Sampling Success: HSM Aries.space Prepares for ICARM 2026 Publication

Schmalkalden, Germany — The Drill Department at HSM Aries.space has successfully concluded an intensive series of subsurface sampling tests. This critical milestone was designed to gather empirical data for our upcoming peer-reviewed research paper, which will be presented at ICARM 2026 (International Conference on Advanced Robotics and Mechatronics). Our upcoming publication is titled: “Hierarchical Mars […]
Field Test Update: Manual Joystick Control on Multiple Terrains
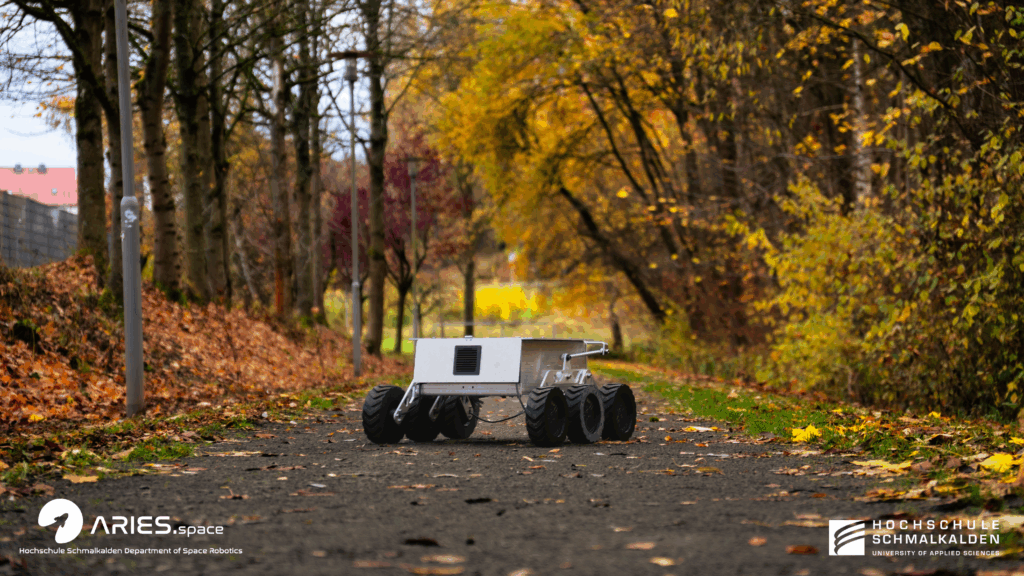
Today, we conducted a field test of our rover using only manual control through a handheld joystick. The purpose of this session was to evaluate how well the rover performs when directly driven by an operator—no autonomous navigation, just pure manual handling. We tested the rover across a variety of terrains, including gravel paths, paved […]