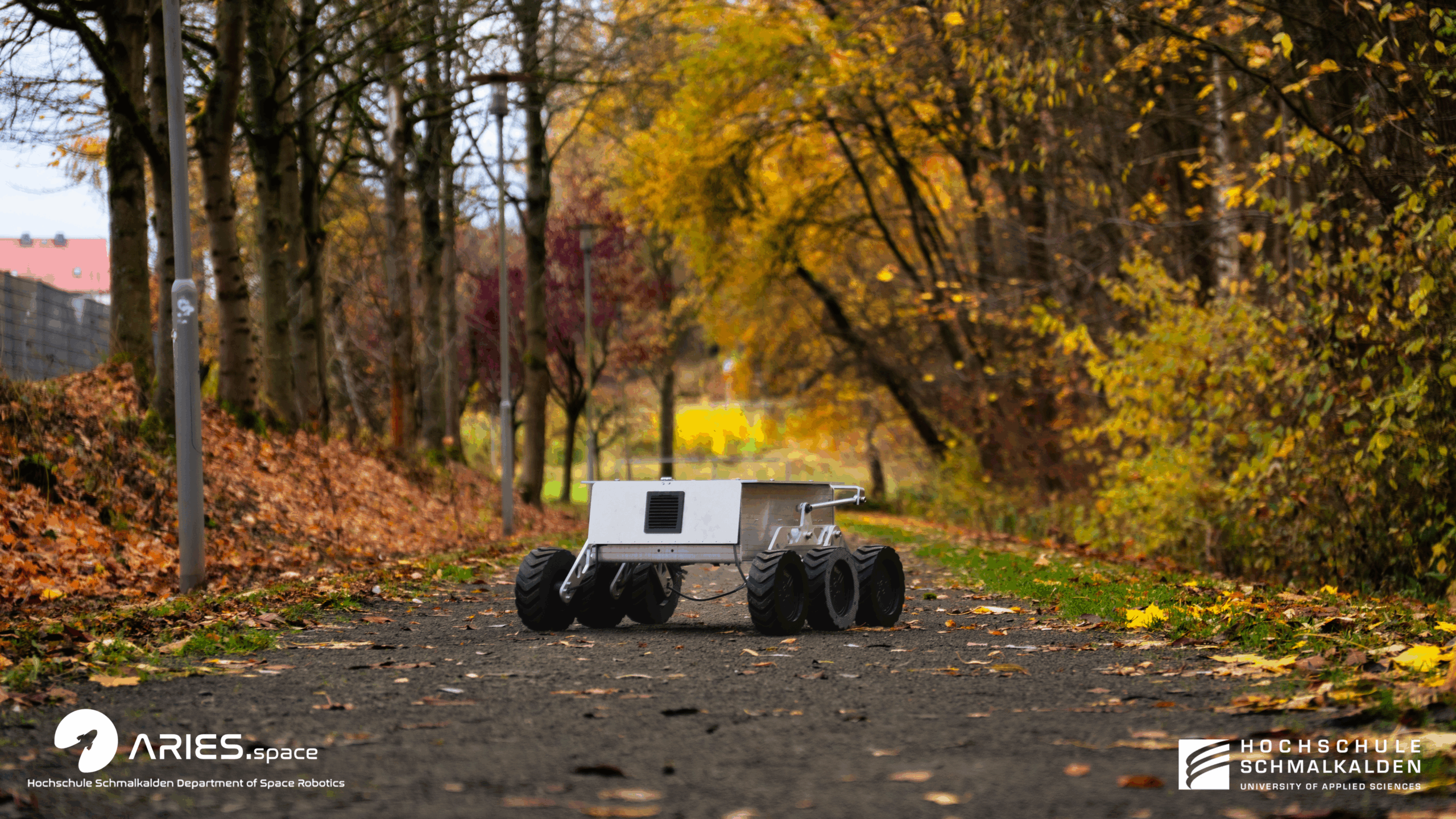

Today, we conducted a field test of our rover using only manual control through a handheld joystick. The purpose of this session was to evaluate how well the rover performs when directly driven by an operator—no autonomous navigation, just pure manual handling.
We tested the rover across a variety of terrains, including gravel paths, paved roads, uphill sections, and muddy ground. On each surface, the rover responded smoothly to joystick inputs, maintaining good traction and stability. The control system exhibited no lag, enabling precise movements and easy handling, even on uneven or slippery surfaces.
Despite the challenging conditions, the rover held up extremely well. Its mechanical components performed consistently, and the chassis remained sturdy throughout the entire test. No issues were observed in the motors, wheels, or control link, confirming that the rover is reliable for manual field operations.
Overall, this session was a success. The rover performed exactly as expected under manual control, proving its durability and responsiveness across different terrain types. Additional testing will follow as we continue to refine the system and prepare for future upgrades.