Driven by interdisciplinary teams, showcasing how undergraduates and mentors unite to solve aerospace challenges.

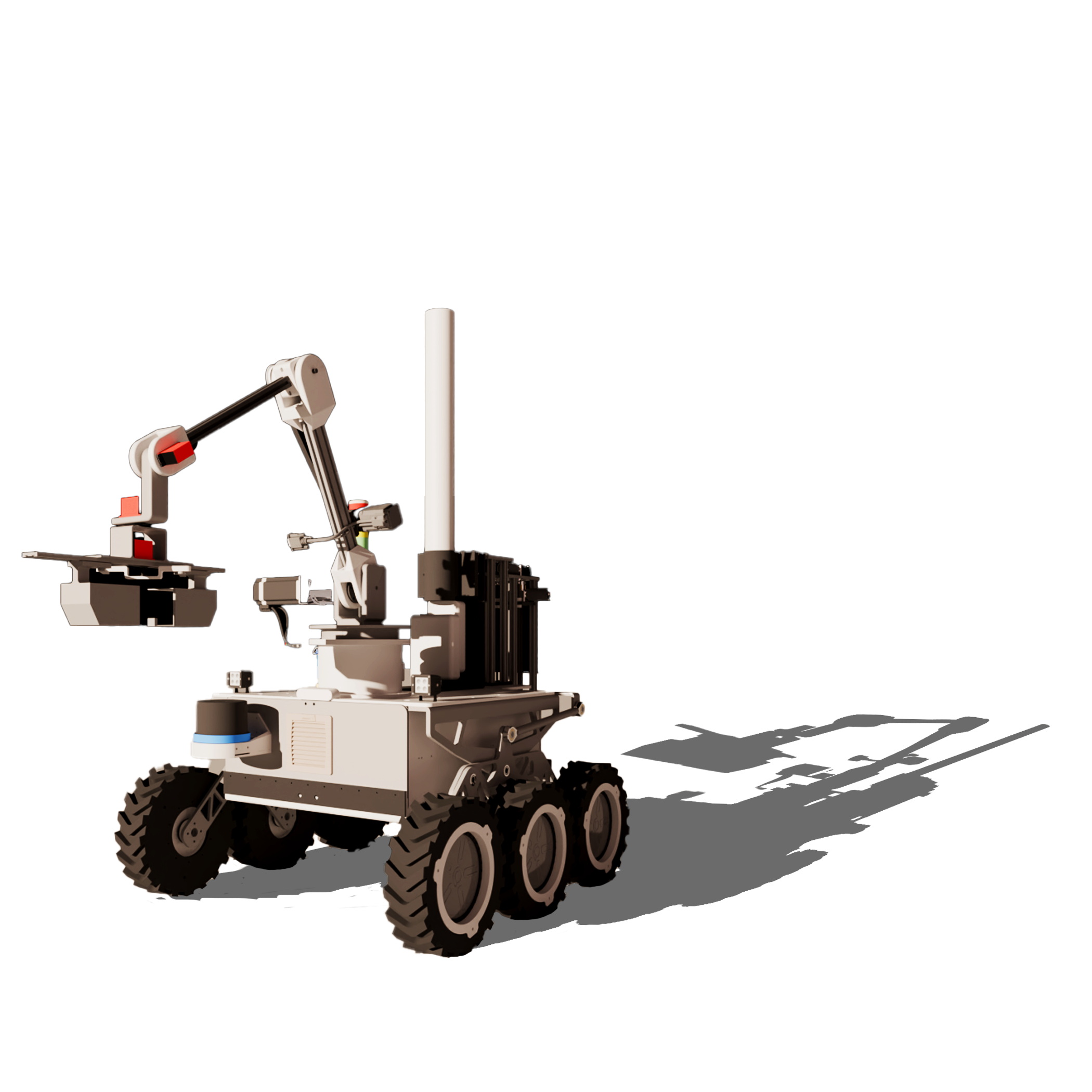
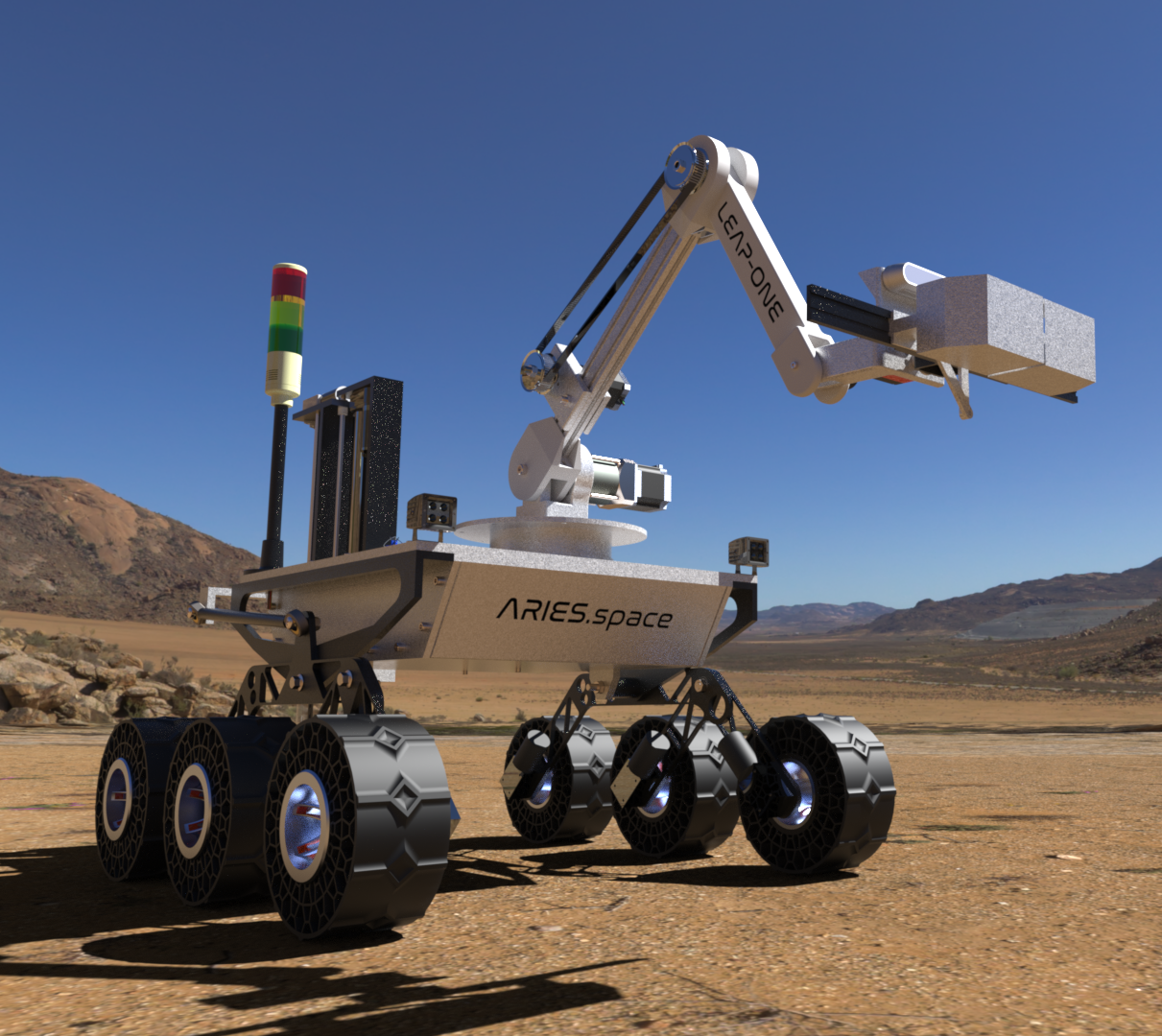
Optimized for rocky, dusty, or low-gravity settings, reflecting conditions on Mars or the Moon.

Ditches brushed motors for enclosed hub motors and uses a triple battery setup to deliver more power and extended resilience.

Each wheel-mounted motor is sealed against dust and debris, offering formidable climbing and maneuvering capabilities.
Splits power demands across three packs, improving stability and safeguarding runtime under heavy load.
Allows quick swaps of scientific instruments, sensors, or mechanical parts—extending the rover’s operational lifespan and adaptability.
Keeps wheels grounded on uneven surfaces, reducing rollovers and wheel slip.
Built from lightweight alloys, offering both rigidity and easy reconfiguration for mission upgrades.
Minimizes energy loss on rough soil, directing power where it’s needed most.

Maintains similar runtime as before but supports higher power draw for demanding tasks.
Prioritizes motors and vital sensors to prevent sudden power deficits.
Monitors temperature in real time, activating cooling measures if pack heat rises too high.
Offers precise positioning for instruments or end-effectors, crucial in delicate operations.
Swaps effortlessly between grippers, scoops, or probes, broadening the rover’s mission scope.
Sensor feedback helps minimize vibration and prevent accidental drops when handling fragile samples.

Penetrates up to 30 cm underground for deeper exploration and data collection.

Adapts drilling force to soil density, reducing mechanical strain.
Extracted samples can be tested on the spot, saving time and boosting scientific yield.
Drone scouting identifies hazards and highlights potential sample areas.

Coordinated telemetry allows both rover and drone to exchange situational awareness and terrain visuals.

Future design considerations aim to house, recharge, or maintain drones onboard.
Merges 2D/3D data for robust obstacle detection, even in dusty or low-light conditions.
Identifies key targets—like rock formations or panels—supporting tasks such as sampling or maintenance.
Executes path planning and dynamic adjustments, essential for large arenas or competitive tasks like ERC.