Schmalkalden, Germany — The Rover Department at HSM Aries.space recently conducted a comprehensive field testing session to evaluate our LEAP-One mobility platform. This rigorous test served a critical dual purpose: validating our chassis for the upcoming European Rover Challenge (ERC) 2026, and capturing empirical mobility data for our upcoming peer-reviewed publication.
The data gathered during these trials will directly support our upcoming ICARM 2026 paper:
“Hierarchical Mars Surface Exploration with LEAP-One: A Compact Rover for Fast Reconnaissance and Subsurface Validation.”
Conquering Unpredictable Terrains
To simulate the harsh, unpredictable surfaces of a planetary mission site, the engineering team subjected the rover to gravel, loose sand, steep inclines, and muddy terrain. The primary objective was to validate our custom suspension geometry and traction control algorithms under high-stress conditions.
Key performance highlights from the field test:
- Rocker-Bogie Excellence: The rover’s rocker-bogie suspension mechanism performed exceptionally well, successfully maintaining all four wheels on the ground while traversing obstacles twice the diameter of the wheels.
- Power Budget Validation: During steep uphill ascents, the team monitored the current draw of each individual wheel motor. The data confirmed that our power consumption remains safely within limits, even under extreme load.
- Advanced Maneuverability: We executed “tank-turn” maneuvers on loose gravel, demonstrating significant precision improvements thanks to our latest software iteration.
Robust & Ready for Integration
The field test concluded with zero mechanical failures. The rigorous environment did highlight a minor need for improved dust sealing around the drive gears—an essential refinement for long-term survival in dusty Martian or lunar environments, which the team is already addressing.
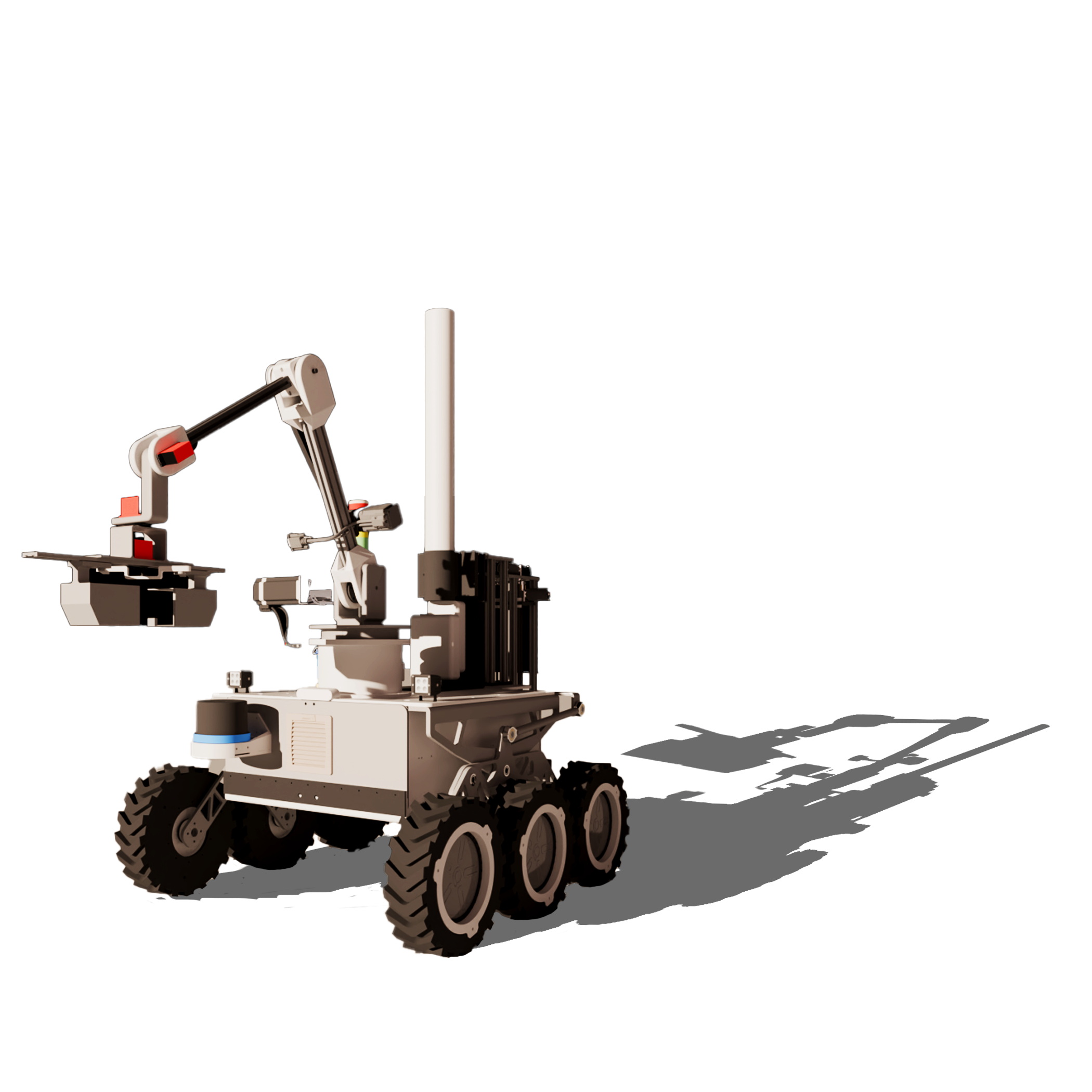
Ultimately, this successful test confirms that the LEAP-One physical chassis is incredibly robust. With the mobility platform fully validated, we now have a stable, competition-ready foundation to begin integrating the science and robotic arm sub-systems for ERC 2026!