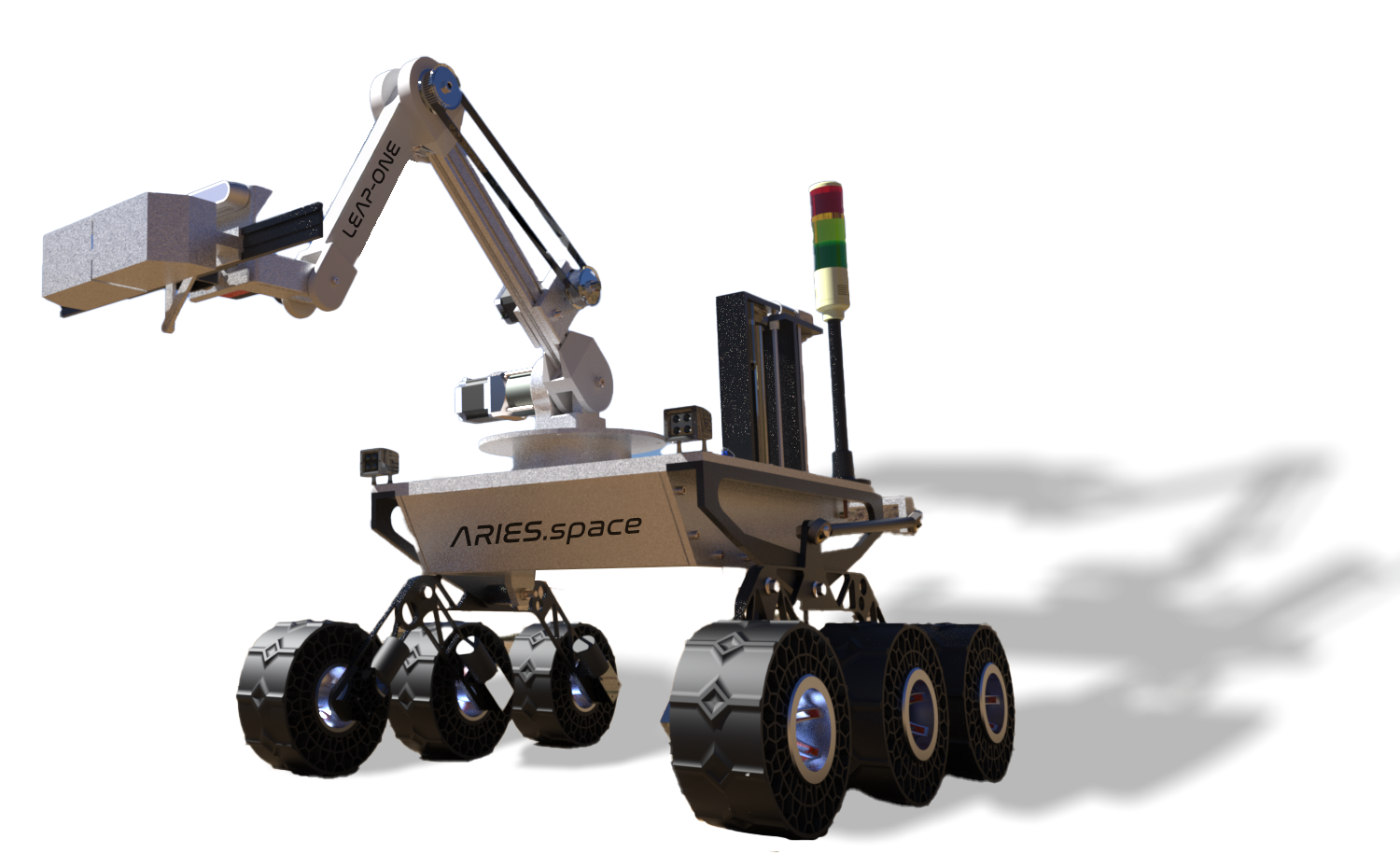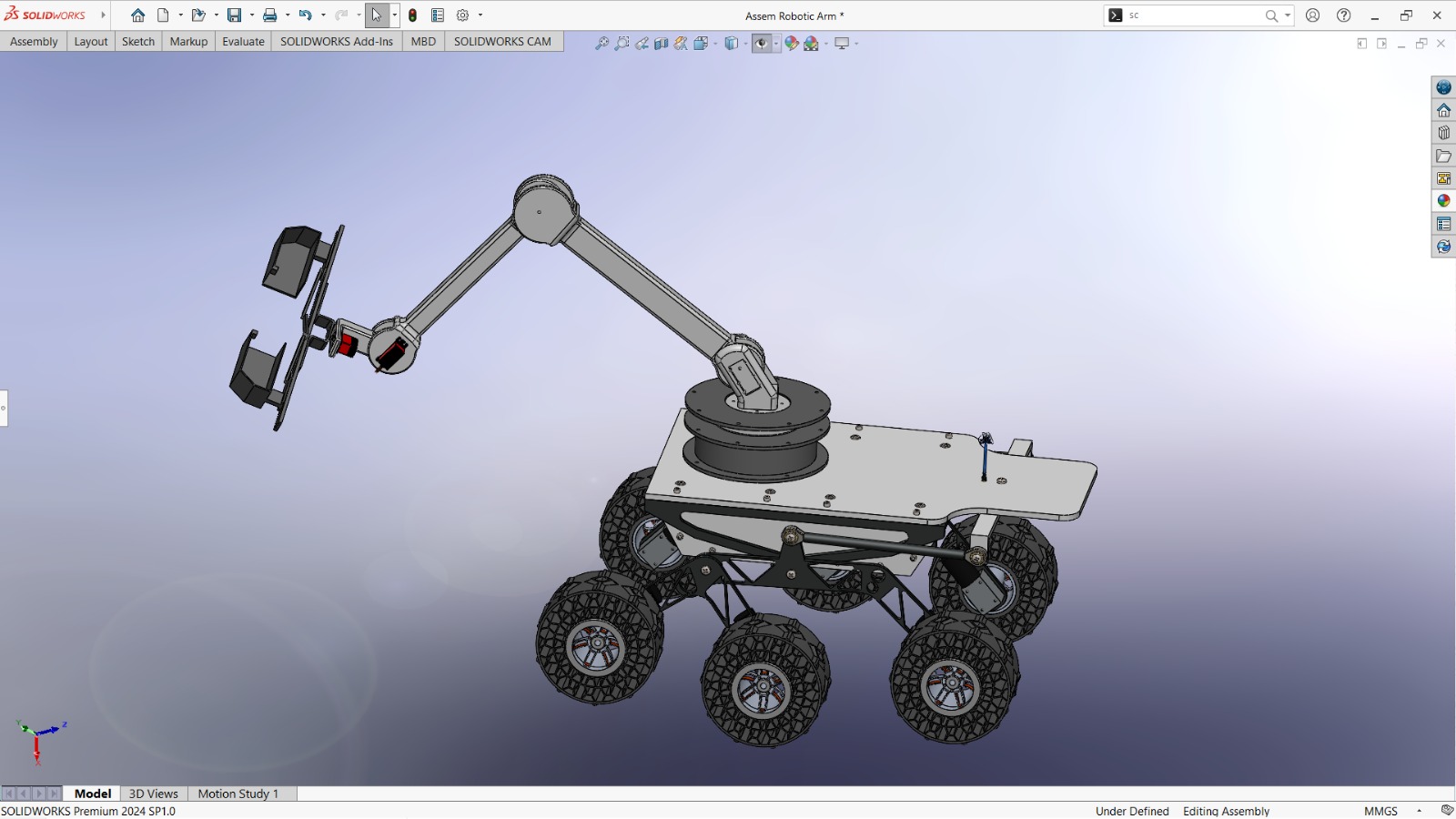

Advancing Precision in Sample Collection and Manipulation
We are excited to announce that the initial design of the robotic arm for the LEAP-One rover has been successfully completed by our team leader, Teja. This critical milestone marks a significant step forward in our mission to equip the rover with versatile and precise manipulation capabilities essential for off-world exploration.
Teja’s innovative design features a multi-jointed arm equipped with an adaptive gripper, engineered to handle a variety of tasks—from delicate sample collection to robust maintenance operations. The design is optimized for both functionality and efficiency, ensuring that the arm can operate reliably under the challenging conditions expected in planetary environments.
“Completing the initial robotic arm design is a major achievement for our team,” said Teja. “This design not only embodies our commitment to pushing the boundaries of student-led innovation but also sets the stage for further refinements and rigorous testing. Our goal is to provide LEAP-One with the dexterity and resilience needed to successfully execute its scientific missions.”
With this milestone reached, our focus now shifts to integrating the robotic arm with the rest of the rover’s subsystems and initiating comprehensive testing protocols. Stay tuned for more updates as we continue to transform our vision into a mission-ready reality, paving the way for groundbreaking advancements in space exploration.